这篇文章主要围绕YoMo——实时边缘计算网关和开发框架和实时边缘检测展开,旨在为您提供一份详细的参考资料。我们将全面介绍YoMo——实时边缘计算网关和开发框架的优缺点,解答实时边缘检测的相关问题,同时
这篇文章主要围绕YoMo —— 实时边缘计算网关和开发框架和实时边缘检测展开,旨在为您提供一份详细的参考资料。我们将全面介绍YoMo —— 实时边缘计算网关和开发框架的优缺点,解答实时边缘检测的相关问题,同时也会为您带来AI边缘计算网关在车路协同中的应用、BAETYL —— 边缘计算开源框架、Gitee 推荐 | 物联网边缘计算网关 FreeIOE、Gitee 推荐 | 边缘计算网关框架 FreeIOE的实用方法。
本文目录一览:- YoMo —— 实时边缘计算网关和开发框架(实时边缘检测)
- AI边缘计算网关在车路协同中的应用
- BAETYL —— 边缘计算开源框架
- Gitee 推荐 | 物联网边缘计算网关 FreeIOE
- Gitee 推荐 | 边缘计算网关框架 FreeIOE
")
YoMo —— 实时边缘计算网关和开发框架(实时边缘检测)
YoMo 是一套开源的实时边缘计算网关、开发框架和微服务平台,通讯层基于QUIC协议,更好的释放了未来5G等低时延网络的价值;为流式处理(Streaming Computing)设计的编解码器yomo-codec能大幅提升计算服务的吞吐量;基于插件的开发模式,5分钟即可上线用户的物联网实时边缘计算处理系统。YoMo关注在工业互联网领域,目的是打造国产化自主可控的工业实时边缘计算体系。

AI边缘计算网关在车路协同中的应用
随着智慧城市建设的不断推进,城市交通也亟待升级优化,智慧交通监控通过放置在道路和路边的各种高清及超高清网络摄像机和Al BOX网关等设备,对道路路况和来往车辆进行实时监控、视频/图像回传和存储,结合Al、移动互联网、物联网、云计算、大数据等技术,实现道路、车辆、交通监管设备之间的快速通信和信息共享。
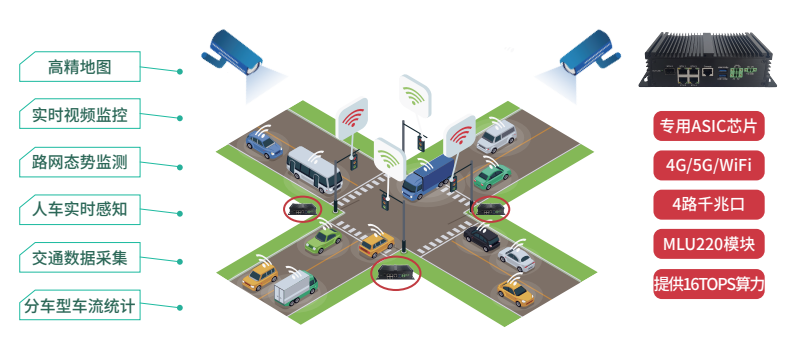
AI网关车路协同场景需求
1.交叉路口:
交通数据采集;高精地图;人车实时感知;路网态势监测;道路信息发布
2.高速/城市快速路口:
高速巡航系统;感知系统;违法事件检测

车路协同拓扑图

视频AI网关的视觉+毫米波+激光雷达融合
1.交通参与者感知,实现车辆、非机动车的检测识别;
2.对交通参与者进行高精度定位,实现位置、速度、方向及车距的感知,分析发布交通态势;
3.识别车道线、停车线、斑马线、可行驶区域、标识牌等;
4.车道交通事件检测,包括拥堵检测、异常停车检测、超速/低速行驶、逆行、道路施工、抛洒物检测等。
车路协同的解决方案

通过边缘计算服务器对外设备接入摄像头、毫米波、激光雷达等设备通过4G/5G/WiFi等无线通信模块(AI视频网关),对采集的数据进行AI融合算法实现远程视频监控。

BAETYL —— 边缘计算开源框架
Baetyl 是 Linux Foundation Edge 旗下项目,旨在将云计算能力拓展至用户现场,提供临时离线、低延时的计算服务,包括设备接入、消息路由、消息远程同步、函数计算、设备信息上报、配置下发等功能。

Gitee 推荐 | 物联网边缘计算网关 FreeIOE

FreeIOE 是用于快速构建工业物联网边缘计算网关的开源框架。

Gitee 推荐 | 边缘计算网关框架 FreeIOE
FreeIOE 是用于快速构建工业物联网边缘计算网关的开源框架。
今天的关于YoMo —— 实时边缘计算网关和开发框架和实时边缘检测的分享已经结束,谢谢您的关注,如果想了解更多关于AI边缘计算网关在车路协同中的应用、BAETYL —— 边缘计算开源框架、Gitee 推荐 | 物联网边缘计算网关 FreeIOE、Gitee 推荐 | 边缘计算网关框架 FreeIOE的相关知识,请在本站进行查询。
本文标签:


![[转帖]Ubuntu 安装 Wine方法(ubuntu如何安装wine)](https://www.gvkun.com/zb_users/cache/thumbs/4c83df0e2303284d68480d1b1378581d-180-120-1.jpg)

